
Automated removal of pistons with 3D part localisation

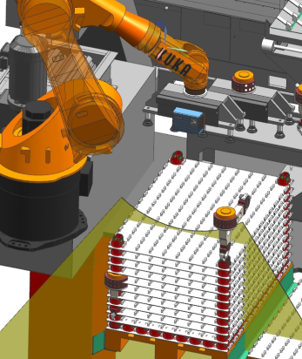
At an automotive supplier, pistons are automatically removed from pallets by a robot. The pistons are roughly pre-oriented in forming films and are stacked on top of each other in several layers. Due to the stack height and the gap of the components in the intermediate layers, 3D recognition of each individual piston is required for removal with the gripper.
The 3D recognition was reliably solved with a PC-based vision system and the image processing software VisionTools V60.
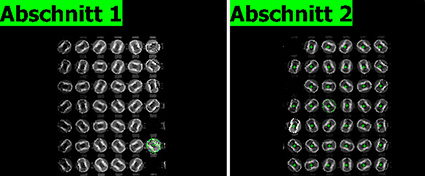
The sensor used is an LMS400 time-of-flight scanner attached to the gripper, which is moved over the pallet by the robot at a constant speed and in a straight line. If the scanner is far enough from the pallet, the entire layer pad can be scanned with a single scan, otherwise the layer pad is picked up in two sections. For each image acquisition, calibration marks with a known position are also captured, which are used by the image processing system to output the position of each individual piston directly in the robot coordinate system (X, Y, Z, Rz).
Since the system works with distance images, foreign objects or tilted components are also detected as interfering contours. If a layer is empty, the position of the intermediate layer is determined so that it can also be automatically removed by the handling system and then stacked on an empty pallet.
The V60 image processing software manages several type variants that can be entered into the system with little effort.
The customer now has several such systems in use.