
Automatisierte Entnahme von Kolben mit 3D Teilelokalisierung

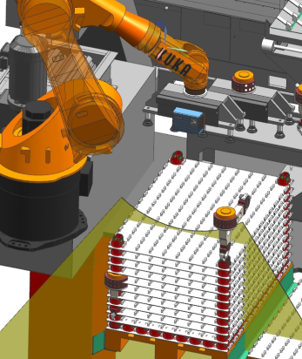
Bei einem Automobilzulieferer werden Kolben automatisiert mit einem Roboter von Paletten entnommen. Die Kolben befinden sich grob vororientiert in Formfolien und sind mehrlagig übereinandergestapelt. Durch die Stapelhöhe und das Spiel der Bauteile in den Zwischenlagen, ist eine 3D Erkennung jedes einzelnen Kolbens zur Entnahme mit dem Greifer erforderlich.
Zuverlässig gelöst wurde die 3D-Erkennung mit einem PC basierten Vision System und der Bildverarbeitungssoftware VisionTools V60.
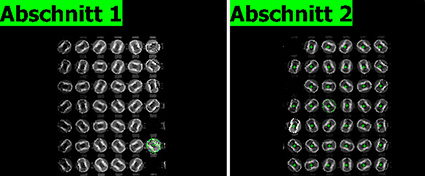
Als Sensor wird ein Lichtlaufzeitscanner vom Typ LMS400 verwendet, der am Greifer befestigt ist und vom Roboter mit einer konstanten Geschwindigkeit und in geradliniger Bahn über die Palette bewegt wird. Bei ausreichendem Abstand des Scanners zur Palette, kann die komplette Zwischenlage mit nur einem einzigen Scanvorgang erfasst werden, andernfalls wird die Zwischenlage in zwei Abschnitten aufgenommen. Bei jeder Bildaufnahme werden auch Kalibriermarken mit bekannter Position erfasst, mit deren Hilfe die Position jedes einzelnen Kolbens vom Bildverarbeitungssystem dann unmittelbar im Roboterkoordinatensystem (X, Y, Z, Rz) ausgegeben wird.
Da das System mit Abstandsbildern arbeitet, werden auch Fremdkörper oder umgekippte Bauteile als Störkontur erkannt. Ist eine Lage leer, wird die Position der Zwischenlage bestimmt, damit auch diese vom Handling automatisiert entnommen und dann auf einer Leerpalette gestapelt werden kann.
Die Bildverarbeitungssoftware V60 verwaltet mehrere Typvarianten, die mit geringem Aufwand in das System eingepflegt werden.
Inzwischen sind bei dem Kunden mehrere solcher Systeme im Einsatz.