
Optical 3D localisation of the car body

What is position detection used for?
Global position recognition is used (as the name suggests) to determine the position of one or more parts in space.
When used in a paint application, for example, the absolute or relative position of the car determined by the camera system can be used to dynamically adapt the robot paths. This has the advantage that a new robot programme does not have to be created for each position, but a central programme exists that can automatically adapt to the conditions.
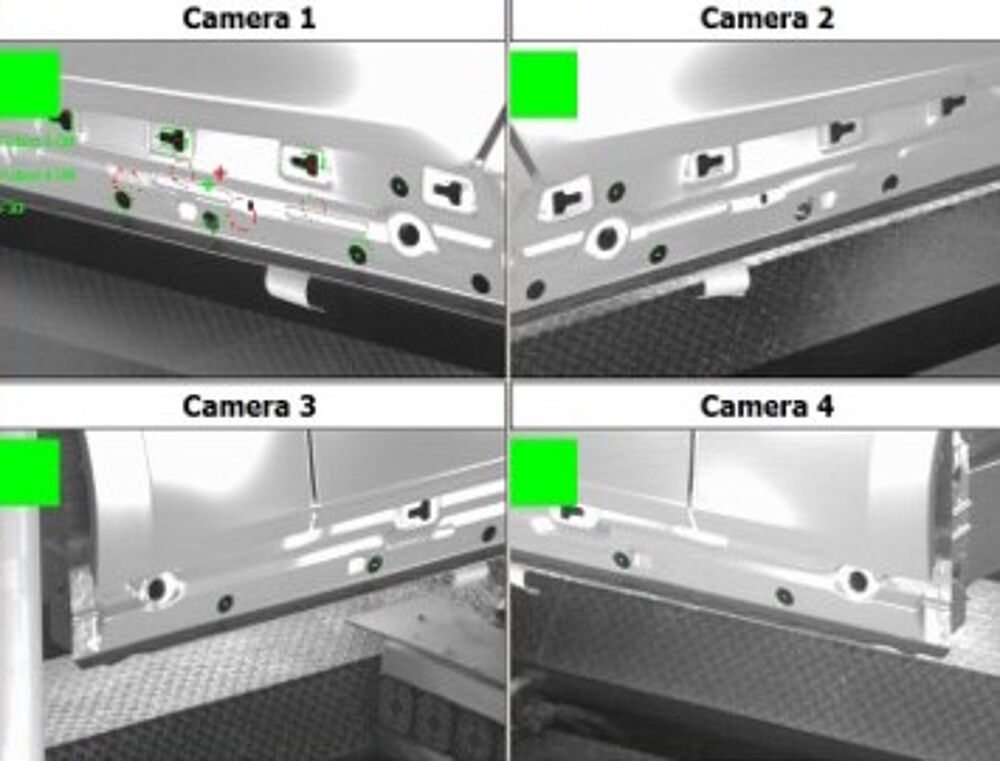
How are the cameras and lighting arranged?
The cameras and their lighting are customised to the task. The hardware control remains the same. It is important that the cameras are positioned in such a way that the features analysed later form a triangle. As this is required to determine the position and rotation of the object.
How is the camera set up?
The camera is physically mounted in the cell or near the part using an aluminium profile or round tube. Once this has been done, the camera is integrated into the V60 image processing software and assigned to the specifications via the menu.
How is the camera calibrated to the robot?
To calibrate the cameras, a calibration mark (illuminated or non-illuminated) is attached to a calibrated robot. The robot is then moved to 18 positions in the camera field of view and analysed by the image processing system. The position of the camera in the robot’s coordinate system is calculated using the coordinates of the robot and the coordinates of the respective position determined in the image. The camera is thus calibrated in the robot coordinate system.
How do I activate and deselect the cameras?
A camera already integrated in V60 can be activated and deactivated via a menu. Please note that deselecting/selecting a camera can cause changes to the evaluation. If a camera is deselected, a slight deviation in measurement accuracy is to be expected!
How does the manual input option work in the event of an incorrect measurement?
Manual input is menu-based and can be selected and deselected via a menu. Manual input, if activated, is always carried out if a characteristic could not be analysed. The automatic process is interrupted and a menu-guided correction of the individual evaluation can be carried out.
There are two options here:
The feature can be successfully analysed using the manual input and the automatic process continues the normal analysis. The feature could not be successfully evaluated even with the manual input, and the automatic process is cancelled with a fault.
What are the advantages of VisionTools?
No markers need to be attached to the bodywork, which then have to be elaborately measured in order to calibrate the cameras.
VisionTools requires neither measuring marks on the car body nor special calibration or adjustment boards. Only a marker is used for calibration, which can be attached to the robot in a non-specific manner.