
Optische 3D Positionsbestimmung der Fahrzeugkarosserie

Fahrzeugkarosserie in der Kamerastation
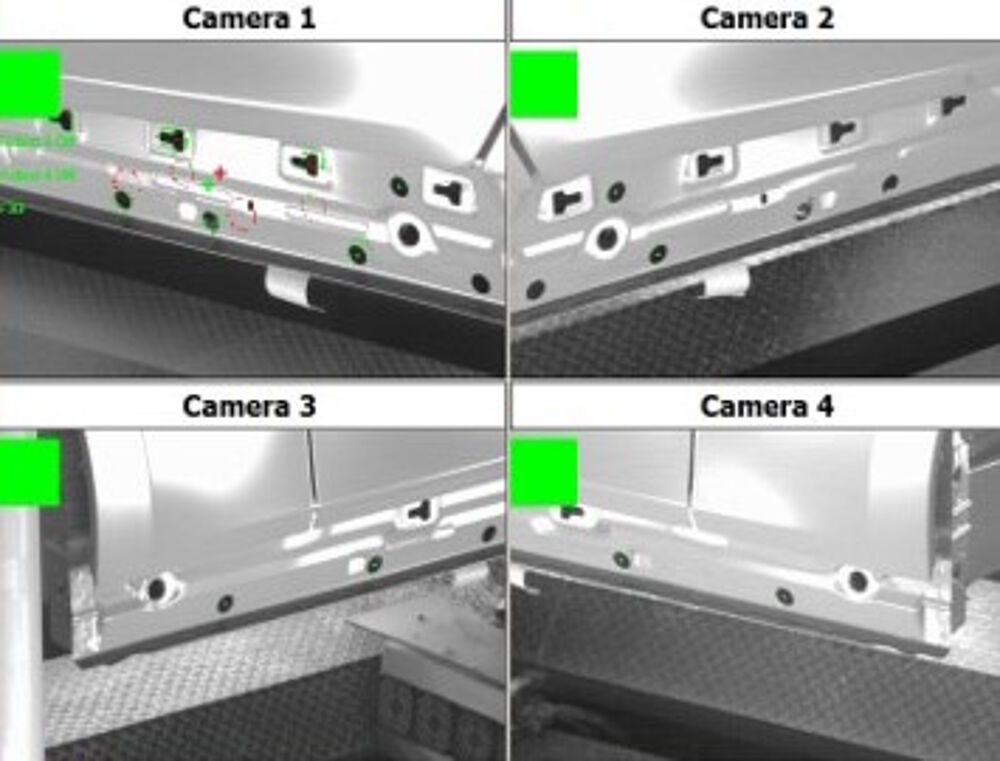
Kamerabilder der Karosserie-Messpunkte
Wozu dient die globale Lageerkennung?
Die globale Lageerkennung wird genutzt, um (wie der Name schon sagt) die Position eines oder mehrerer Bauteile im Raum festzustellen.
Bei der Anwendung in z.B. einer Lackapplikation, können anhand der durch das Kamerasystem festgestellten Absolut- oder Relativ-Position des Bauteils die Roboter-Verfahrwege dynamisch angepasst werden. Dies hat den Vorteil, dass nicht für jede Position ein neues Roboterprogramm erstellt werden muss, sondern ein zentrales Programm existiert, welches sich automatisch an die Gegebenheiten anpassen kann.
Wie sind die Kamera- und Beleuchtungen angeordnet?
Die Kameras und deren Beleuchtungen werden individuell an die Aufgabe angepasst. Die Steuerung der Hardware bleibt dabei gleich. Wichtig ist, dass die Kameras so platziert werden, dass die später ausgewerteten Merkmale ein Dreieck ergeben. Da dies benötigt wird um die Position und Rotation des Bauteils zu bestimmen.
Wie wird die Kamera eingerichtet?
Die Kamera wird physikalisch in der Zelle oder in der Nähe des Bauteils mittels Aluprofil oder Rundrohr befestigt. Wenn dies erledigt ist, wird die Kamera in die Bildverarbeitungssoftware V60 eingebunden und menügeführt den Vorgaben zugewiesen.
Wie wird die Kamera auf den Roboter kalibriert?
Für die Kalibrierung der Kameras wird an einem eingemessenen Roboter eine Kalibriermarke (beleuchtet oder unbeleuchtet) befestigt. Anschließend werden mit dem Roboter 18 Positionen im Kamerablickfeld angefahren und vom Bildverarbeitungssystem ausgewertet. Anhand der Koordinaten des Roboters und der im Bild ermittelten Koordinaten der jeweiligen Position, wird die Position der Kamera im Koordinatensystem des Roboters berechnet. Die Kamera ist somit im Roboter Koordinatensystem kalibriert.
Wie funktioniert die An- und Abwahl der Kameras?
Eine bereits in V60 integrierte Kamera, kann über ein Menü aktiviert und auch deaktiviert werden. Hier ist zu beachten, dass die Abwahl/Anwahl einer Kamera Änderungen an der Auswertung bewirken können. Bei der Abwahl einer Kamera ist mit einer geringen Abweichung der Messgenauigkeit zu rechnen!
Wie funktioniert die Handeingabeoption bei Fehlmessung?
Die Handeingabe ist Menü gestützt und kann über ein Menü an- und abgewählt werden. Die Handeingabe, soweit aktiviert, wird immer dann ausgeführt, wenn ein Merkmal nicht ausgewertet werden konnte. Hierbei wird der Automatikablauf unterbrochen und eine menügeführte Korrektur der individuellen Auswertung kann durchgeführt werden.
Hier gibt es zwei Möglichkeiten:
Das Merkmal kann anhand der Handeingabe erfolgreich ausgewertet werden und der Automatikablauf setzt die normale Auswertung fort. Das Merkmal konnte selbst mit der Handeingabe nicht erfolgreich ausgewertet werden und der Automatikablauf wird mit einer Störung abgebrochen.
Wo liegen die Vorteile bei VT gegenüber dem Wettbewerb?
Wettbewerber müssen an der Karosserie Messmarken anbringen, die dann aufwändig eingemessen werden müssen und kalibrieren dann hierauf Ihre Kameras. VisionTools benötigt weder Messmarken an der Karosserie noch spezielle Kalibriertafeln. Es wird lediglich eine Kalibrierhilfe, welche unspezifisch am Roboter befestigt wird, zum Kalibrieren benötigt.